Deux nouvelles thèses à l’Icam site de Vendée
Recherche
7 Juil 2022
Enseignant chercheur en robotique associé au LS2N (Laboratoire des Sciences du Numérique de Nantes), Vincent Bégoc a co-encadré deux doctorants, Guillaume Jeanneau et Valentin LeMesle qui ont récemment soutenu leur thèse de doctorat avec succès, venant ainsi couronner trois années de dur labeur !
Guillaume Jeanneau s’est intéressé à la sécurité de l’homme dans le cadre de sa collaboration avec un robot. La robotique collaborative est en progression depuis quelques années, car elle permet une plus grande capacité d’adaptation de lignes de production en faisant du robot un outil polyvalent et plus intuitif pour l’homme. L’un des principaux défis actuels est d’assurer la sécurité des humains interagissant avec ce type de robot.
La thèse de Guillaume a introduit le robot R-Min, un robot plus sûr, non pas grâce à des capteurs ou un système de commande sophistiqué, mais directement grâce à son architecture mécanique. En effet, le robot R-Min est un robot compliant capable de se reconfigurer largement en cas de collision, réduisant ainsi la douleur ressentie par l’humain. Une analyse du robot R-Min a consisté, en premier lieu, à modéliser ce type de structure compliante pour en évaluer les performances d’un point de vue sécurité. Des essais ont ensuite été réalisés permettant de mettre en évidence la réduction par un facteur 4 à 5 de l’effort d’impact à l’aide d’un dispositif de mesure dédié qui reproduit les caractéristiques biomécaniques d’un corps humain.
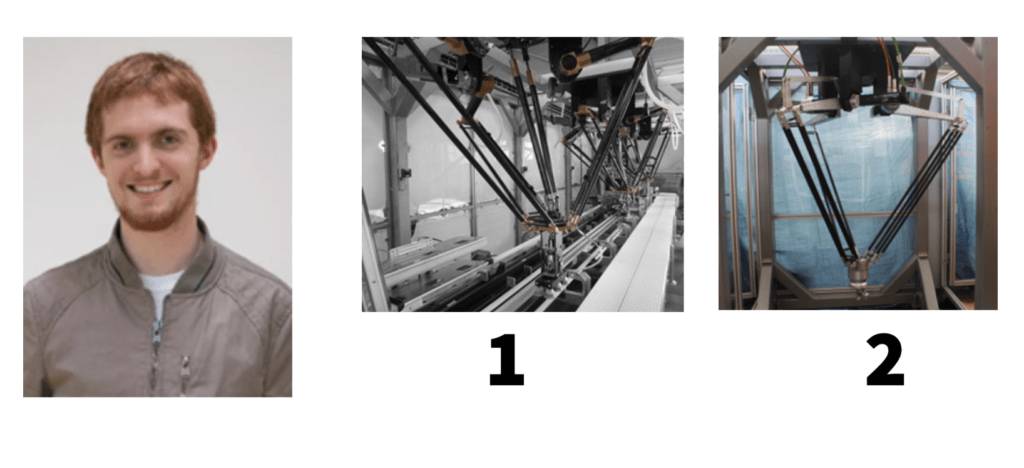
1 – Extrait d’une vidéo du robot se déformant sous l’effet d’une collision.
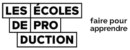
2- Dispositif expérimental pour la mesure des efforts d’impact en cas de collision avec un humain, le prototype de robot R-Min et le capteur de collision permettant de reproduire les caractéristiques biomécaniques du corps humain.

Valentin Le Mesle a réalisé une thèse CIFRE en collaboration avec l’industriel MG-Tech, un groupe spécialisé dans la réalisation de solutions automatisées de fin de ligne pour l’industrie agro-alimentaire. Valentin s’est concentré sur la définition d’une nouvelle architecture mécanique dédiée à des opérations d’empaquetage, nécessitant cinq degrés de liberté, dont deux rotations de l’outil pour orienter le produit. La société MG-Tech utilise actuellement l’architecture bien connue du robot parallèle Delta, avec une jambe télescopique et des liaisons cardans pour transmettre la rotation d’un moteur fixé sur la base vers l’outil. Les principales contributions de cette thèse ont été la proposition d’une nouvelle jambe de robot Delta permettant de transmettre deux degrés de liberté par une succession de parallélogrammes. Cette solution qui a fait l’objet d’un dépôt de brevet, permet d’obtenir un espace de travail plus important suivant la verticale ainsi qu’une architecture plus facile à maintenir, car uniquement composée de liaisons pivot ou sphérique. Un prototype de robot à 5 degrés de liberté a pu être réalisé à la fin de la thèse pour évaluer les performances en cadence et en précision de cette nouvelle architecture.
1 – Contexte industriel
2 – Prototype de robot à cinq degrés de liberté